

"Para a segunda etapa, pretendemos usar um posicionador eletromagnético (Fastrak Polhemus) para capturar posições das sondas NIRS localizadas na cabeça do paciente em motinoramento, desta forma podemos usar o feedback visual das imagens de TC para melhorar a precisão no montado das sondas NIRS. Para conseguir isso, devemos estabelecer um grupo de pontos de referência visíveis tanto na cabeça do paciente quanto na imagem CT para gerar uma boa calibração do posicionador 3D em relação ao espaço da imagem de TC."
© Copyright angelivan34@hotmail.com
PhD student website
José Angel Iván Rubianes Silva

Group Project
Designer: José Angel Iván Rubianes Silva.
Slideshow do processamento de imagens de CT.
1 / 3
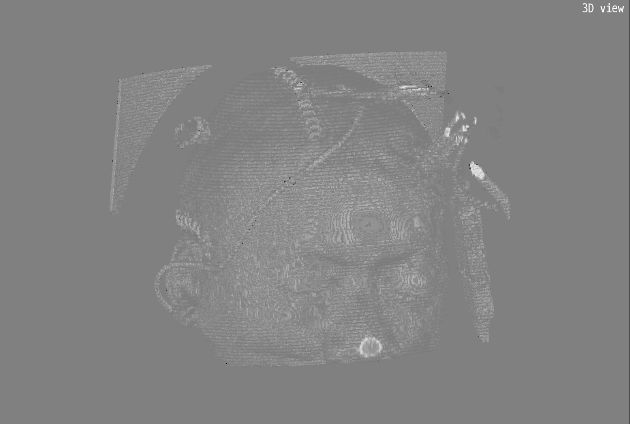
Limiarização.
2 / 3
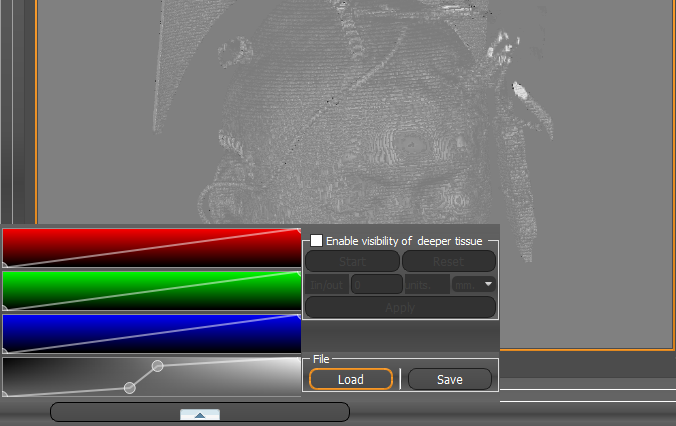
Editando a função transferência (paleta de cores).
3 / 3

Resultado da edição da função transferência
Etapa inicial:
Mostramos como é possível visualizar a superfície cortical usando uma imagem de tomografia computadorizada e um conjunto de ferramentas implementadas em nosso visualizador "VMTK".
A sequência desse processo é a seguinte:
- Nós aplicamos a ferramenta de limiar para eliminar alguns objetos e ruído (o limiar está na escala de unidades de Hounsfield para imagens de CT) .
- Usamos uma paleta de cores para visualizar melhor quais são os objetos que estão conectados sobre a superfície da cabeça.
- Eliminamos as conexões da cabeça com os objetos estranhos, utilizando a ferramenta borracha ("Eraser").
- Extraímos o componente máximo conectado.
- Aplicamos um valor muito baixo para o canal alfa, dentro de um intervalo determinado pelo usuário (da superfície da cabeça até o valor de profundidade inserido), possibilitando a visualização da superfície do cérebro.
- Finalmente, usamos uma paleta de cores personalizada para visualizar melhor a superfície do cérebro e as áreas de interesse.
Meu nome é José Angel Iván Rubianes Silva e sou doutorando na Faculdade de Engenharia Elétrica e de Computação (FEEC) da Universidade Estadual de Campinas (UNICAMP).
Atualizações: 15/07/2018, 29/08/2018
Segunda etapa:
Conseguimos atingir o objetivo da nossa proposta, e ainda mais interessante, é que é possível usar o digitalizador para obter posições em tempo real nos volumes de tomografia computadorizada (TC) ou ressonância magnética (RM).
Conseguimos estabelecer uma série de pontos identificáveis tanto no sujeito de teste quanto no tipo de volume (TC ou RM). Então, a partir desses pontos correlacionados, é possível calibrar o digitalizador no espaço do volume.
Uma vez que a calibração foi feita, o próximo passo foi usar técnicas de computação gráfica para visualizar a posição capturada pelo digitalizador 3D (neste caso, Fastrak Polhemus® 3.0) em tempo real. Esse resultado pode ser observado no "Tutorial 2" da seção de vídeos. As técnicas de renderização e visualização também foram utilizadas na parte de aquisição dos pontos para a calibração, que é mostrada no mesmo vídeo.
Terceira etapa:
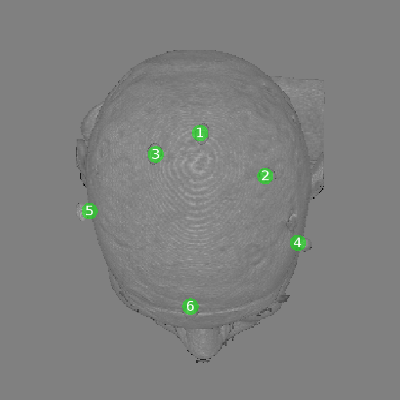
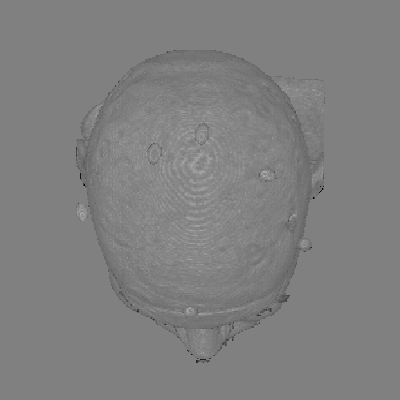
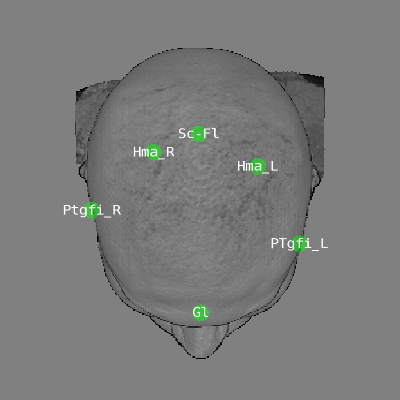
Para validar a precição da captura de posiçoes pelo digitalizador usando o mesmo protocolo de medidas de NIRS, se realizou um experimento no cual marcamos 6 pontos de referencia sobre o escalpo da RM dos voluntários (Figura 1). O passo seguinte foi colocar as cápsulas de vitamina "E" sobre a cabeça dos voluntários utilizando nosso prototipo (VMTK), os pontos pre-planejados e o digitalizador Fastrak para fazer outro escan de RM (figura 2). Uma vez obtido o segundo volume de RM com as cápsulas visíveis, fizimos um contraste entre as projeções dos puntos pre-planajedos e os digitlizados sobre o córtex (Figura 3). Um dos resultados pode ser observado no "Tutorial 4" da seção de vídeos.
Observação:
Analisando os primeiros volumes, podemos ver que os últimos pontos a serem capturados têm um erro de deslocamento, assim, ao realizar o terceiro experimento decidimos inverter a seqüência de captura dos pontos, começando com o ponto número 6 para o número 1 (Figura 4), dando como resultado que o ponto 6 (o primeiro da seqüência), este melhor posicionado em relação ao ponto pré-planejado, e ponto 1 (último na seqüência), este levemente deslocado em relação ao ponto pré-planejado (Figura 5). Assim, assumimos que o erro de deslocamento esta em função ao tempo de captura dos pontos, devido que, a origem (transmissor) do fastrak sofre algum movimento na passagem do tempo para capturar as posições. Assim, de acordo com a análise e o tipo de protocolo usado, sugerimos fazer capturas entre 5 ou 6 pontos no máximo, para realizar um bom teste.
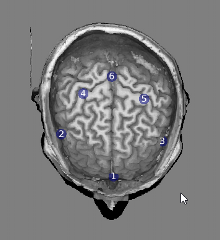
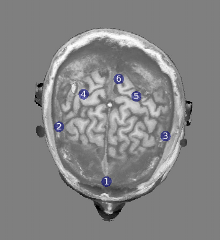
Figura 1. Pontos de referência no escalpo
Figura 2. Projeção dos pontos pre-planejados
Figura 3. Projeção dos pontos digitalizados e escaneados em RM
a). RM com as cápsulas digitalizadas.
a). Marcadores sobre o escalpo.
Figura 5. Marcadores pre-planejados.
Figura 4. Marcadores a partir dos pontos digitalizados na sequencia inversa.

