Demo Script
Image creation
A binary image with an ellipsis
>>> f = iagaussian([100,100], [45,50], [[20,5],[5,10]]) > 0.0000001
>>> iashow(f)
(100, 100) Min= 0 Max= 1 Mean=0.098 Std=0.30
 |
|
| f |
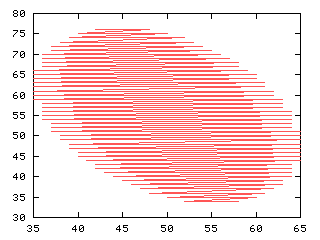
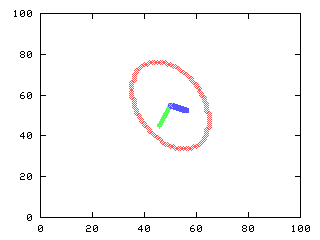
Plot the eigenvectors and centroid
The eigenvectors are placed at the centroid and scaled by the square root of its correspondent eigenvalue
>>> iashow(f)
(100, 100) Min= 0 Max= 1 Mean=0.098 Std=0.30
>>> x_,y_ = iaind2sub(f.shape, Numeric.nonzero(Numeric.ravel(iacontour(f))))
>>> g,d0 = iaplot(y_, 100-x_)
>>> # esboça os autovetores na imagem
>>> x1, y1 = Numeric.arange(mx[0], 100-mx[0]+a1*vec1[0], -0.1), Numeric.arange(mx[1], mx[1]-a1*vec1[1],0.235)
>>> g,d1 = iaplot(x1, 100-y1) # largest in green
>>> x2, y2 = Numeric.arange(mx[0], mx[0]-a2*vec2[0], 0.1), Numeric.arange(mx[1], mx[1]+a2*vec2[1],0.042)
>>> g,d2 = iaplot(x2, 100-y2) # smaller in blue
>>> g,d3 = iaplot(mx[0], 100-mx[1]) # centroid in magenta
>>> g('set data style points')
>>> g('set xrange [0:100]')
>>> g('set yrange [0:100]')
>>> g.plot(d0, d1, d2, d3)
>>>
 |
 |
|
| f | y_, 100-x_ |
 |
 |
|
| x1, 100-y1 | x2, 100-y2 |
 |
 |
|
| mx[0], 100-mx[1] | d0, d1, d2, d3 |
Display the transformed data
The centroid of the transformed data is zero (0,0). To visualize it as an image, the features are translated by the centroid of the original data, so that only the rotation effect of the Hotelling transform is visualized.
>>> ytrans = Numeric.floor(0.5 + y + Numeric.resize(mx, (x.shape[0], 2)))
>>> g = Numeric.zeros(f.shape)
>>> i = iasub2ind(f.shape, ytrans[:,1], ytrans[:,0])
>>> Numeric.put(g, i, 1)
>>> iashow(g)
(100, 100) Min= 0 Max= 1 Mean=0.094 Std=0.29
 |
|
| g |
Image read and display
The RGB color image is read and displayed
>>> f = iaread('boat.ppm')
>>> iashow(f)
(3, 257, 256) Min= 0 Max= 218 Mean=94.533 Std=57.35
 |
|
| f |
Extracting and display RGB components
The color components are stored in the third dimension of the image array



Displaying each component of the transformed image
The transformed features are put back in three different images with the g1 with the first component (larger variance) and g3 with the smaller variance
>>> g1 = y[:,0]
>>> g2 = y[:,1]
>>> g3 = y[:,2]
>>> g1 = Numeric.reshape(g1, r.shape)
>>> g2 = Numeric.reshape(g2, r.shape)
>>> g3 = Numeric.reshape(g3, r.shape)
>>> iashow(g1)
(257, 256) Min= -194.702376045 Max= 163.945218189 Mean=0.000 Std=97.84
>>> iashow(g2)
(257, 256) Min= -53.4192670921 Max= 81.6627408632 Mean=0.000 Std=13.42
>>> iashow(g3)
(257, 256) Min= -17.361967919 Max= 20.538452635 Mean=0.000 Std=4.14
 |
 |
|
| g1 | g2 |
 |
|
| g3 |