Tese de Doutorado de Mercedes G. Márquez
Pré-alinhamento de Imagens de
Profundidade via Malhas Simplificadas
|
(1) Imagem de Profundidade Vista 1 |
(2) Imagem de Profundidade Vista 2 |
(3) Pré-alinhamento das duas imagens |



Introdução |
O processo de Reconstrução 3D de objetos a partir de imagens de profundidade compreende três fases: aquisição, na qual a superfície do objeto é escaneada a partir de vários pontos de vista, gerando um conjunto de n imagens de profundidade. Registro, na qual uma transformação rígida (matriz de rotação e translação) deve ser estimada para colocar as imagens, par a par, em um único referencial. E integração, na qual redundâncias entre vistas registradas são tratadas para construir um modelo 3D completo único.
Na etapa de registro distinguem-se ainda duas etapas: pré-alinhamento e registro fino. Na primeira, uma aproximação inicial de registro é estimada através da extração de amostras nas duas imagens, que ocupem a mesma posição no espaço do objeto (pontos correspondentes) e o cálculo de uma transformação rígida T (matriz de rotação R e um vetor translação t) de forma que a distância quadrada entre os pares de pontos correspondentes, seja minimizada. Na segunda etapa, iterações são aplicadas sobre a transformação obtida para que os erros de alinhamento sejam minimizados.
As atuais técnicas de solução se diferenciam basicamente pela fonte de dados de onde os pares de correspondências são extraídos. Um primeiro grupo considera o conjunto completo de amostras originais e, um segundo, considera um subconjunto de amostras originais que possuem características especiais. As técnicas do primeiro grupo se tornam ineficientes ao propor um espaço de busca muito grande; e nas técnicas do segundo grupo, alguma informação importante para as correspondências pode ser descartada, ao restringir-se somente a um conjunto específico de dados (dependentes de certos tipos de geometria).
Neste trabalho propõe-se um algoritmo de registro que procura contornar estas limitações com base em duas inovações. O uso de uma malha triangular simplificada que preserve as características globais da forma original da imagem no lugar do conjunto completo de amostras originais e um novo descritor, denominado “triedro”, para buscar as correspondências, mais eficientemente, entre os espaços reduzidos das amostras. Diferentemente das propostas existentes, este descritor integra informações geométricas locais e globais das amostras, o que o leva a ser mais discriminante na busca.
Hipótese
|
O sistema visual humano consegue fazer registro de objetos através da essência da sua forma. Adicionalmente, Belongie e Malik [1] afirmam que um objeto pode ser modelado como um possivelmente infinito conjunto de pontos, mas sua forma é essencialmente capturada por um subconjunto finito dos seus pontos. Portanto, no lugar de um conjunto de dados denso, pode-se usar um conjunto esparso de dados que aproxime a forma representada pelos dados originais. Assim, a hipótese deste trabalho é que, para realizar um pré-alinhamento, é suficiente considerar uma representação que, com poucas amostras, consiga exprimir a essência da forma geométrica pertencente à superfície do objeto.
O Algoritmo |
Nosso algoritmo de pré-alinhamento automático de duas imagens de profundidade é composto de três etapas: (A) Redução, (B) Construção de triedros e (C) Casamento, conforme mostramos na Figura 1.
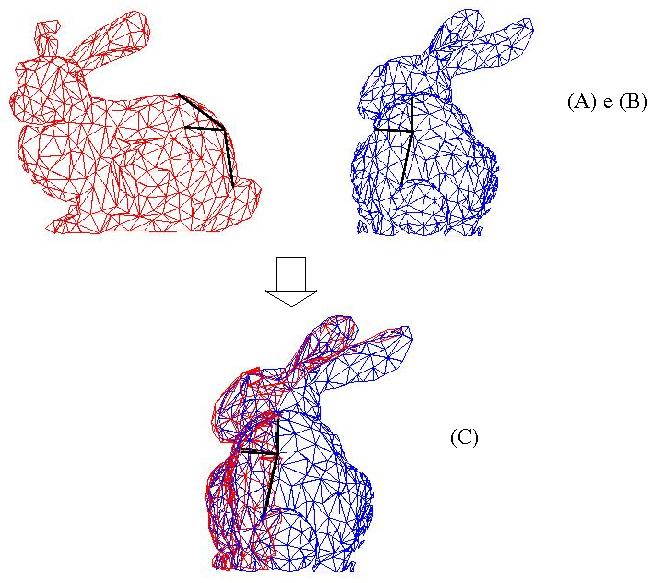
Figure 1: Fluxograma do Algoritmo
1) Redução
A etapa de redução é baseada na hipótese que uma representação simplificada da imagem de profundidade que retenha a essência da sua forma geométrica, é suficiente para obtermos um pré-alinhamento. Portanto dispensamos uma representação excessivamente detalhada e usamos somente uma versão simplificada. Propõe-se, então, uma malha simplificada (Figura 2(c)) da malha densa (Figura 2(b)), que foi construída pela interpolação das amostras da imagem de profundidade (Figura 2(a)).
|
(a) Imagem de profundidade |
(b) Malha fina |
(c) Malha simplificada |
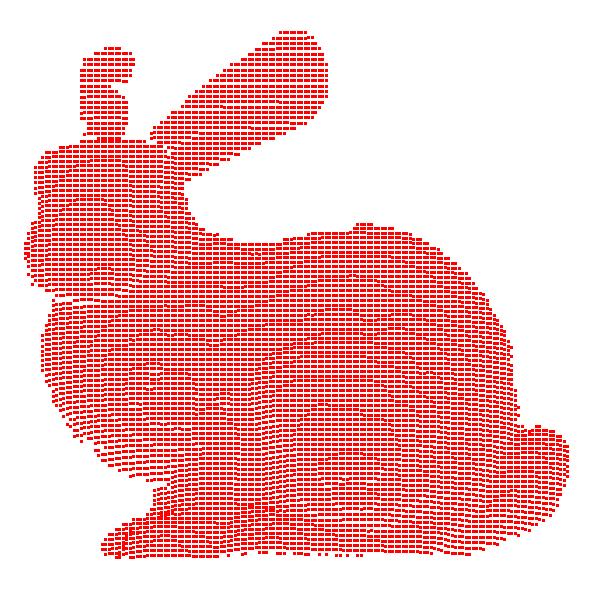
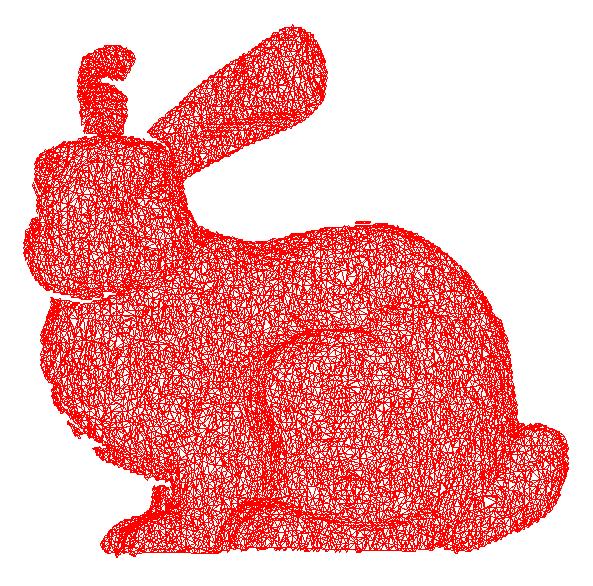
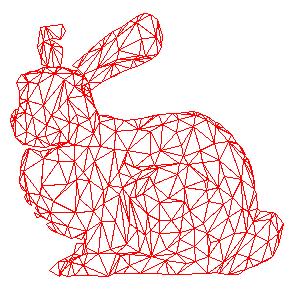
Figura 2. Redução de dados
Para obtermos a malha fina a partir da imagem de profundidade usou-se o procedimento simples sugerido em [2]. Para obtermos a malha simplificada é usado o algoritmo de simplificação QSLIM apresentado em [3] o qual usa o princípio de decimação por contração de arestas. Este princípio estabelece a eliminação de uma aresta e sua substituição por um ponto, à medida que se busca preservar maximamente a geometria da superfície, pela minimização dos erros introduzidos. Algumas adaptações precisaram ser feitas no algoritmo QSLIM para usá-lo no algoritmo proposto. No lugar do número de faces necessárias para controlar o nível de simplificação, usamos o parâmetro ε o qual depende do índice de suavidade estimado para a superfície e do número de amostras por área. Acredita-se que esses parâmetros influenciam fortemente o nível de resolução adequado para as malhas.
b) Construção de Triedros
A obtenção da transformação responsável pelo pré-alinhamento depende da determinação de um par de descritores correspondentes na região de sobreposição, portanto os descritores devem ser criteriosa e eficientemente extraídos a partir do conjunto de amostras da imagem. Propõe-se como descritor, um triedro espacial que consiste de três vetores linearmente independentes preferencialmente ortogonais, cuja origem e pontos extremos dos eixos, são vértices da malha triangular simplificada. A esse triedro será associada informação local (curvatura média) e, também, informação global (posição relativa de três vértices “suficientemente afastados” do vértice V na origem). O fato de se considerar uma região mais abrangente permite representar uma região com maiores aspectos da forma geométrica da superfície, ao invés de uma simples região local. Isto torna o descritor altamente discriminante na etapa de busca. Para determinar a distância di dos vértices do triedro até sua origem levou-se em conta dois requisitos conflitantes: maior abrangência e, por outro lado, a sua pertinência à região de sobreposição pois um descritor excessivamente grande pode não ficar inteiramente contido dentro desta região. Como a região de sobreposição é desconhecida, pensou-se em um valor conhecido relacionado com o tamanho do objeto, como a média M das dimensões da caixa limitante da malha que representa o objeto, onde M = (Dx + Dy + Dz )/3 com Dx denotando a largura, Dy a altura e Dz a profundidade da caixa limitante (Figura 3). Uma flexibilidade maior pode ser dada fazendo f1*M ≤ d ≤ f2*M , onde f1 < f2. Os valores f1 e f2 podem ser facilmente fornecidos pelo usuário como a menor e a maior estimativa da porcentagem, em pixels efetivos, que a região de sobreposição representa em relação à imagem de profundidade.
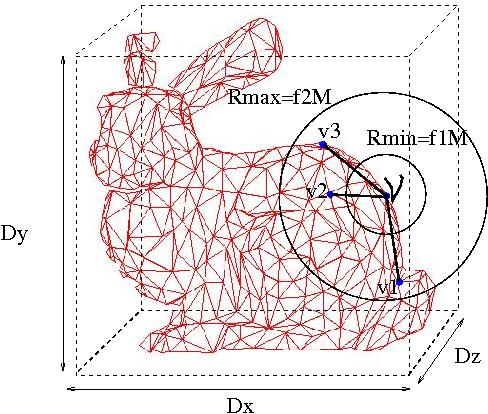
Figure 3: Construção de um Triedro
3) Casamento
Esta etapa é subdividida em duas sub-etapas: Procedimento de Busca por um Descritor-Alvo e Remoção de Correspondências Falsas.
Como procedimento de busca por um descritor-alvo,
usou-se como base o princípio básico do algoritmo DARCES [4],
o qual busca exaustivamente na imagem 2, três amostras
extraídas da imagem
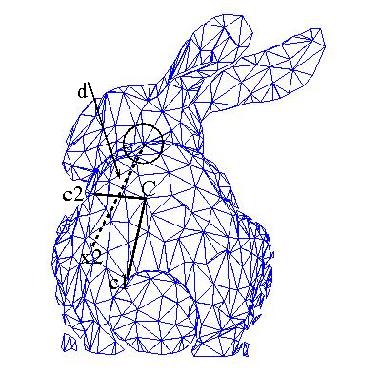
Figure 4: Procura do quarto ponto
O casamento dos triedros reduz drasticamente o número de possíveis correspondências, porém ainda se tem um conjunto considerável de remanescentes. A transformação candidata Tk (Rk,tk) é determinada a partir de um par de triedros correspondentes T1 e T2 constituídos pelos vértices (V, v1 , v2 , v3 ) e (C, c1 , c2 , c3 ) respectivamente. Para remover falsas correspondências, cada transformação candidata Tk passa por uma avaliação de ajuste global através da contagem de vértices na malha transformada M1 , que alinharam suficientemente bem com vértices na malha M2 (ou seja sua distância até a malha M2 é menor que um limiar pré-definido). Dentre todas as transformações candidatas, escolhe-se aquela que teve o maior número de alinhamentos, baseado no fato que a transformação que registra a região de sobreposição de ambas imagens deve ter a maior quantidade de vértices alinhados.
Implementação
|
A implementação do algoritmo proposto pode
ser obtida clicando aqui.
Os códigos foram desenvolvidos usando linguagem C e a biblioteca gráfica OpenGL. As
imagens de entrada podem ser obtidas em [6],[7] ou [8].
This program is free software: you can redistribute it and/or modify it under the termsof the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
Publicações |
1) Tese de Doutorado
·
Pré-alinhamento de Imagens de Profundidade via Malhas Simplificadas [pdf]
Autora: Mercedes Rocío Gonzales
Márquez
2) Artigos
Publicados
· A
non-self-intersection Douglas-Peucker Algorithm [pdf]
Autores: Mercedes Rocío
Gonzales Márquez e Wu Shin-Ting
Publicado em
Proceedings of the 16th
Brazilian Symposium on Computer Graphics and Image Processing
·
The Douglas-Peucker Algorithm: Sufficiency
Conditions for Non-Self-Intersections [pdf]
Authors: Wu
Shin-Ting, Adler Cardoso Gomes da Silva, e Mercedes Rocío Gonzales Márquez
Publicado no Journal of the Brazilian Computer
Society
·
Using simplified meshes for crude registration of
two partially overlapping range images[pdf]
Autores: Mercedes Rocío
Gonzales Márquez e Wu Shin-Ting
Publicado
·
An automatic crude registration of two partially overlapping range images
[pdf]
Autores: Mercedes Rocío
Gonzales Márquez e Wu Shin-Ting
Publicado em
Proceedings of the 21th Brazilian Symposium on Computer Graphics and Image
Processing
·
Crude registration of range images through matching of their simplified
meshes [pdf]
Autores: Mercedes Rocío
Gonzales Márquez e Wu Shin-Ting
Aceito para publicação em Proceedings of the Eleventh IASTED International
Conference on Computer Graphics and
Imaging
– CGIM 2010
Referências
|
|
[1] S.Belongie and J.Malik. Shape
matching and object recognition using shape contexts. IEEE Transactions
on Pattern Analysis and Machine Intelligence, 24:509–522, 2002. [2] G. Turk and M. Levoy.
Zippered polygon meshes from range images. In Computer Graphics
Proceedings, pp. 311-318. [3] Michael Garland. Simplification
Using Quadric Error Metrics. PhD thesis, School of Computer Science
Carnegie Mellon University, New York, USA, 1999. [4] Chu-Song Chen, Yi-Ping Hung, and Jen-Bo Cheng. RANSAC-based
DARCES: A new approach to fast automatic registration of partially
overlapping range images. IEEE Transactions on Pattern Analysis and Machine
Intelligence, pages 1229–1234, 1999. [5] Szymon Rusinkiewicz.
Estimating curvatures and their derivatives on triangle meshes. In 3DPVT’04:
Proceedings of the 3D Data Processing, Visualization, and Transmission, 2nd
International Symposium on (3DPVT’04), pages 486–493, [6] Range images ( [7] Range images (Universidade de Standford). http://www-graphics.stanford.edu/data/ [8] Range images (Universidade
de Sttutgart). http://range.informatik.uni-stuttgart.de/htdocs/html/
|
|
|